Roboter-Arm:
Kleine Demonstration wie der Roboter Arm (von Maplin) vom Raspberry Pi angesteuert werden kann.
Dabei habe ich ein Python Skript genutzt welches die USB-Schnittstelle direkt anspricht
und die entsprechenden Befehle zur Ansteuerung der Motoren ausführt.
Die Steuerung erfolgt über die Tastatur:
- Beenden mit 'x'
- links/rechts 'a' 's'
- Schulter hoch/runter 'e' 'd'
- Ellenbogen hoch/runter 'r' 'f'
- Handgelenk hoch/runter 't' 'g'
- Zange zu/auf 'q' 'w'
- Licht an/aus (toggle) 'l'
So sieht's aus (im Zweifel bitte original AVI downloaden von oben rechts: Video ~32MB):
↑ ←
Teile-Liste:
- Raspberry Pi
- ... und den Roboter-Arm (von Maplin)
Quelltext:
Quellcode robotarm.py
↑ ←
Multifunktions-Anzeige:
2x16 Zeichen Display angesteuert durch den Raspberry-Pi.
Durch den Taster können verschiedene Funktionen abgerufen/angezeigt werden.
Mithilfe eines Temperatursensors TMP36 und einem Analog-Digital-Wandler MCP3008 wird
unteranderem die gemessene aktuelle/minimum/maximum Temperatur angezeigt.
Durch wiederholtes drücken des Tasters kann man 3 Informationen abrufen:
- Begrüssung + IP-Adresse
- Aktuelles Datum und Uhrzeit
- Aktuelle Temperatur und bisher gemessene min/max Temperatur
So sieht's aus (im Zweifel bitte original AVI downloaden von oben rechts: Video ~57MB):
↑ ←
Teile-Liste:
- Raspberry Pi
- MCP3008 AD-Wandler
- TMP36 Sensor
- Taster (Schliesser)
- 10k Ω Potentiometer
- LCD-Display (2x16)
- ... und einige Kabel
Schaltplan:
![[ multi-function-display-Steckplatine_klein.jpg ]](raspi/multi-function-display-Steckplatine.jpg)
Quelltext:
Quellcode lcd_temp.py
↑ ←
Zumo-Control
Steuerung von Zumo via Bluetooth
Steuerung von Zumo
-Chassis mit einer Android-App via Bluetooth. Steuerung erfolgt wahlweise über:
- Schalflächen
- Neigungskontrolle
So sieht's aus:
↑ ←


↑ ←
Teile-Liste:
- Raspberry Pi zero w Details
- Zumo Chassis Kit Details
- 2x 100:1 Micro Metal Gearmotor HP 6V Details
- DC Motor Driver 2x1.5A (HR8833) Details
- ... und ein paar Kabel
Schaltplan:
![[ zumo-control_fritzing_klein.jpg ]](raspi/zumo-control_fritzing.jpg)
Quelltext Python:
Quellcode control-zumo.py
↑ ←
Quelltext Java (Android):
Quellcode MainActivity.java
↑ ←
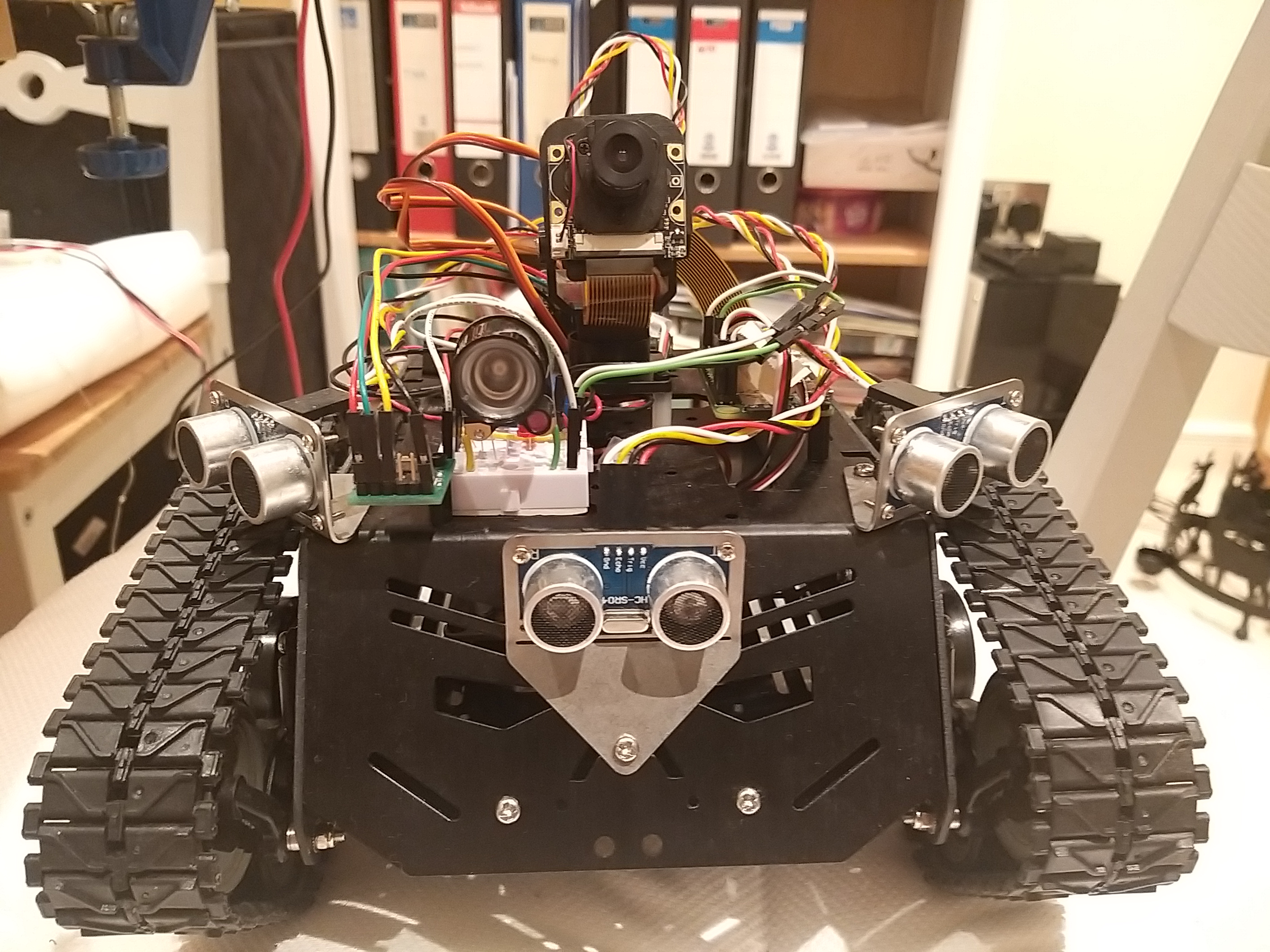
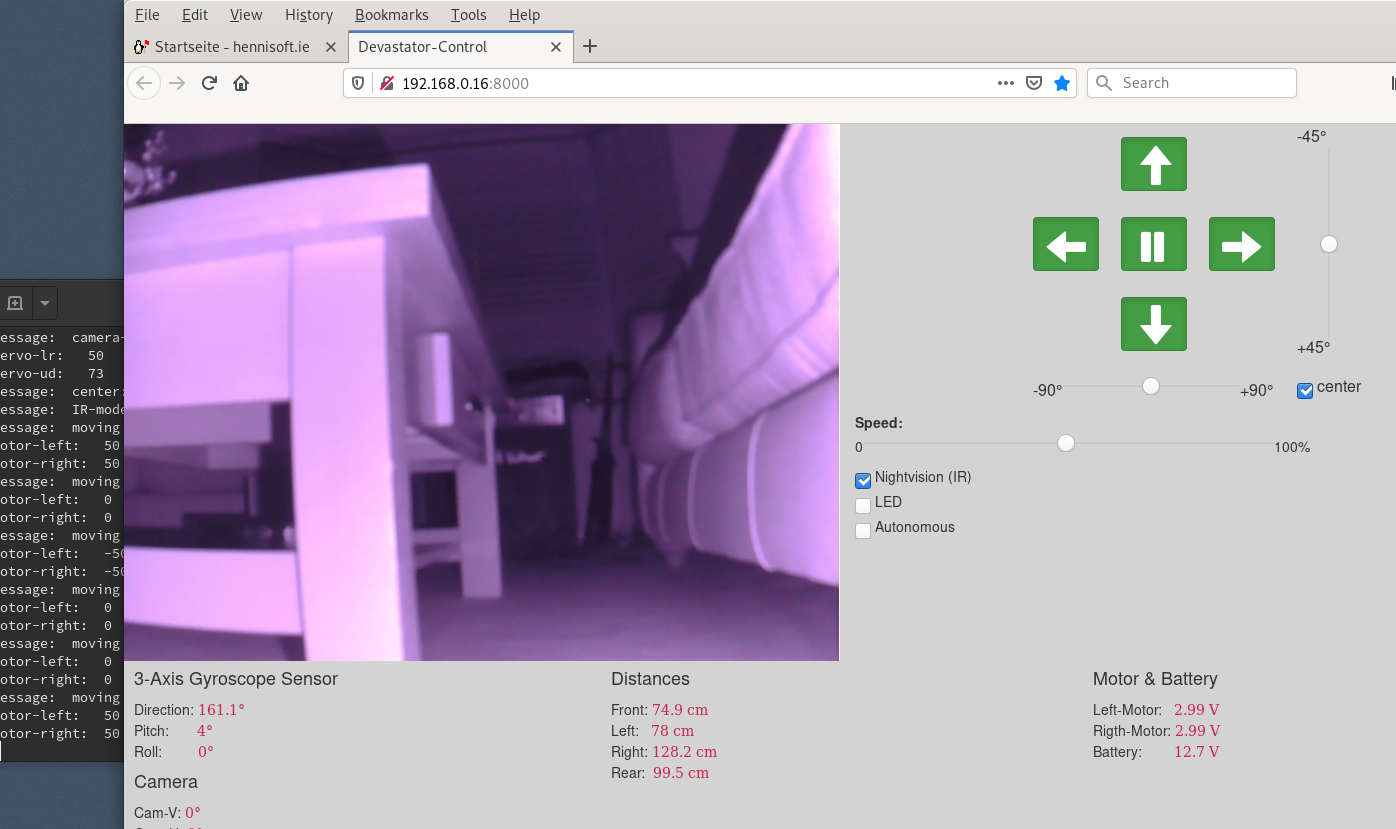
Devastator
Überwachungs Roboter:
Teilautonomer Roboter, welcher über eigenes Webinterface gesteuert wird und folgende Funktionen bereithält:
- Livestream-Video
- 4x Distanzsensoren
- schwenkbare (Infrarot-) Kamera + aktive zuschaltbare IR-LED
- steuerbare LED (oder sonstiger Digitalausgang)
- Statusmeldungen (Batteriestatus, Auslastung)
- 3-Achsensensor + Kompass
Teile-Liste:
- Raspberry Pi zero w Details
- Devastator (Tank Mobile Robot Platform - enthält 2x 6V Motoren) Details
- Thunderborg (Dual 5A Motor Controller mit DC/DC & RGB LED - I2C) Details
- Ultraborg (PWM Servo Control mit Infrarot Sensor - I2C) Details
- CMPS10 (Tilt Compensated Compass Module - I2C) Details
- 4x HC-SR04 (Ultraschall Distanz Sensor) Details
- ADA1967 (Mini Pan-Tilt Kit - enthält 2x Micro Servos) Details
- Raspberry Pi Kamera Modul (Nachsicht & verstellbare-Fokus Linse) Details
- BC337 NPN Transistor
- Gleichrichter-Diode
- 2x 330 Ω Wiederstände
- 2,2 µF Kondensator
- Mini Steckbrett
- ... und ein paar Kabel
↑ ←
Python Quelltext:
Quellcode devastator3.py
↑ ←
HTML Quelltext:
Quellcode devastator2.html
↑ ←
... in der Mache
.
Schon fertig, aber noch nicht dokumentiert.
Hier schonmal vorab ein paar Bilder:



↑ ←
Download:
Roboter-Arm
- Quellcode robotarm.py
- notwendige Klasse für Zeicheneingabe getch.py
- Video (~ 32 MB) robotarm.avi
Multifunktions-Anzeige
- Quellcode lcd_temp.py
- Schaltplan
multi-function-display-Steckplatine.jpg
(mit "Fritzing" hergestellt) - Video (~ 57 MB) multifunction_display.avi
Zumo-Control
Steuerung von Zumo via Bluetooth
- Android Quellcode (Projekt exportiert aus Android Studio) Zumo-Control.zip
- Python Quellcode: control-zumo.py
- Schaltplan: zumo-control_fritzing.jpg
Devastator
Überwachungs Roboter
- Python Quellcode devastator3.py
- HTML Quellcode devastator2.html