robot-arm:
small demonstration how the robot-arm (from Maplin) can be controlled by Raspberry PI.
A Python script is used to directly address the USB interface from the robot-arm and
to control the motors on the arm via the commands.
The robot-arm will be controlled via keyboard:
- exit with 'x'
- left/right 'a' 's'
- shoulder up/down 'e' 'd'
- elbow up/down 'r' 'f'
- wrist up/down 't' 'g'
- grip closing/opening 'q' 'w'
- lights on/off (toggle) 'l'
that's how it looks like (in doubt, please download original AVI from top right: video ~32MB):
↑ ←
item-list:
- Raspberry Pi
- ... and the robot-arm (from Maplin)
sourcecode:
sourcecode robotarm.py
↑ ←
multifunction-display:
2x16 character display driven by Raspberry-Pi.
Push-button allows to toggle different functions/displays.
Temperature sensor TMP36 and AD-converter MCP3008 enables Raspberry-Pi
to show e.g. current/min/max temperature.
Due to push-button you can toggle between 3 different informations:
- greetings + IP-address
- current date and time
- current temperature and measured min/max temperature
that's how it looks like (in doubt, please download original AVI from top right: video ~57MB):
↑ ←
item-list:
- Raspberry Pi
- MCP3008 AD-converter
- TMP36 sensor
- push-button
- 10k Ω potentiometer
- LCD-display (2x16)
- ... and a few cables
circuit:
![[ multi-function-display-Steckplatine_klein.jpg ]](raspi/multi-function-display-Steckplatine.jpg)
sourcecode:
Quellcode lcd_temp.py
↑ ←
Zumo-Control
control Zumo via Bluetooth
control Zumo
-chassis with Android-App via Bluetooth. Controlling via:
- bottons
- decline control
that's how it looks like:
↑ ←


↑ ←
item-list:
- Raspberry Pi zero w Details
- Zumo Chassis Kit Details
- 2x 100:1 Micro Metal Gearmotor HP 6V Details
- DC Motor Driver 2x1.5A (HR8833) Details
- ... and a few cables
circuit:
![[ zumo-control_fritzing_klein.jpg ]](raspi/zumo-control_fritzing.jpg)
source Python:
source control-zumo.py
↑ ←
source Java (Android):
source MainActivity.java
↑ ←
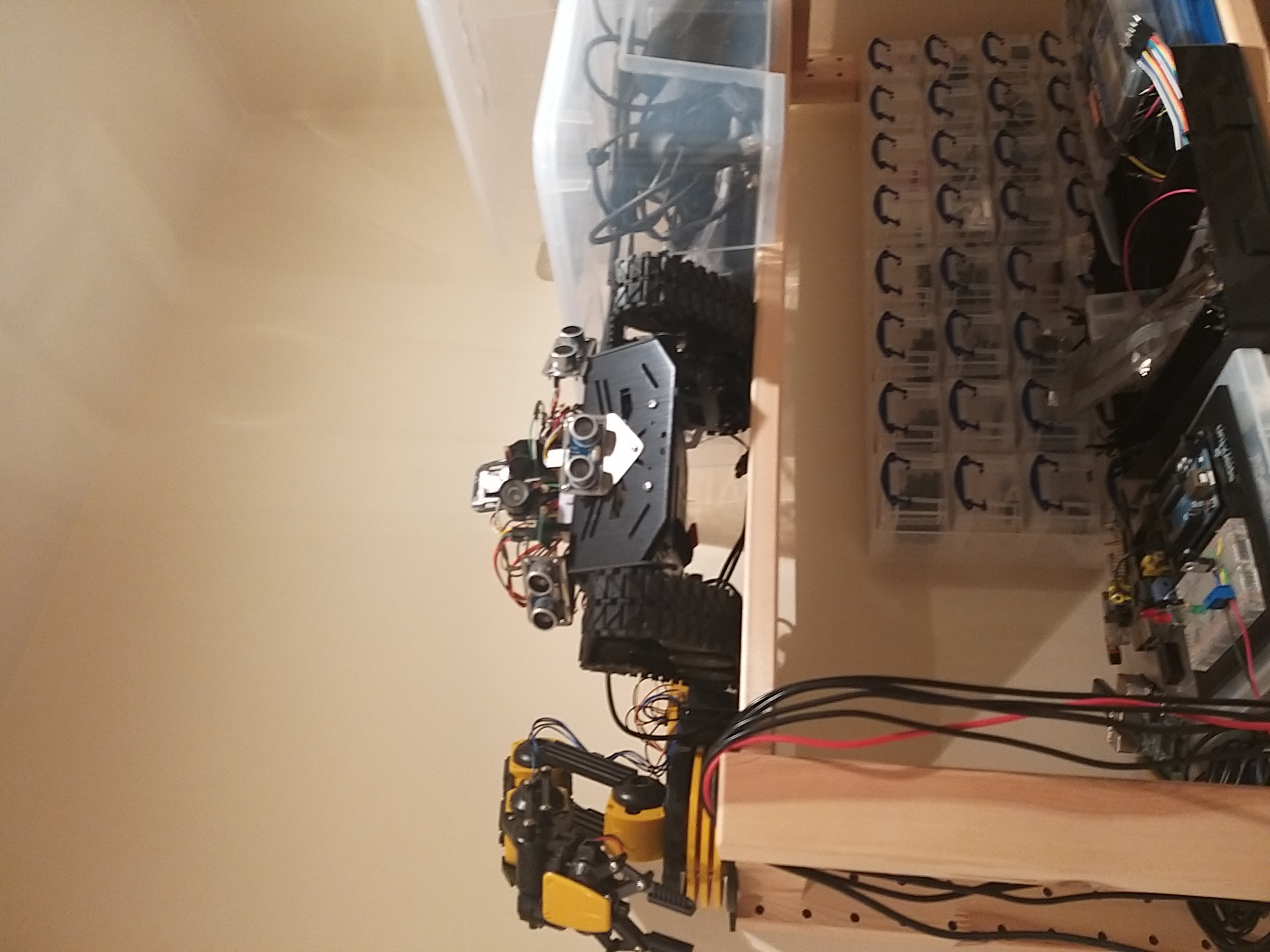
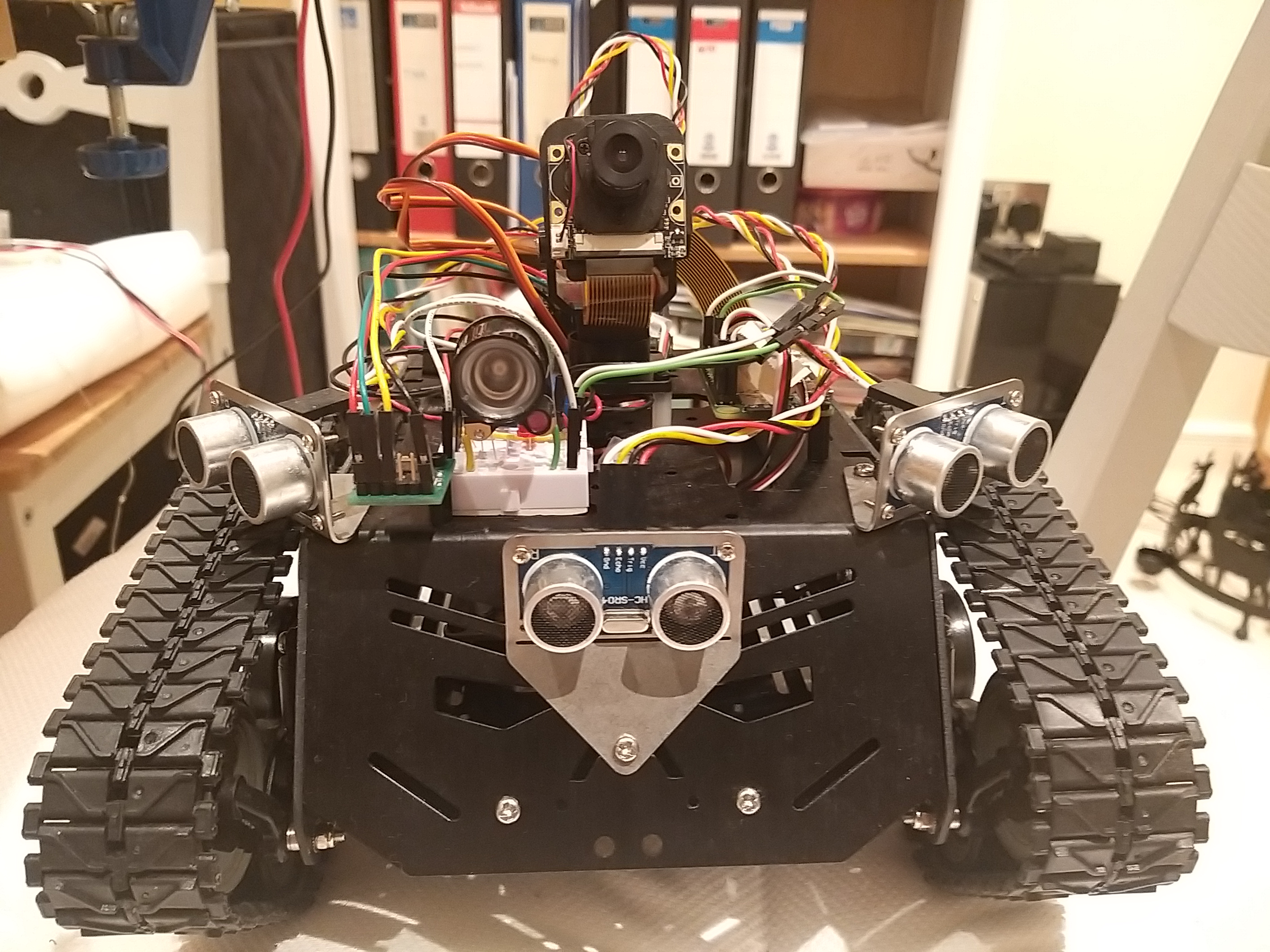
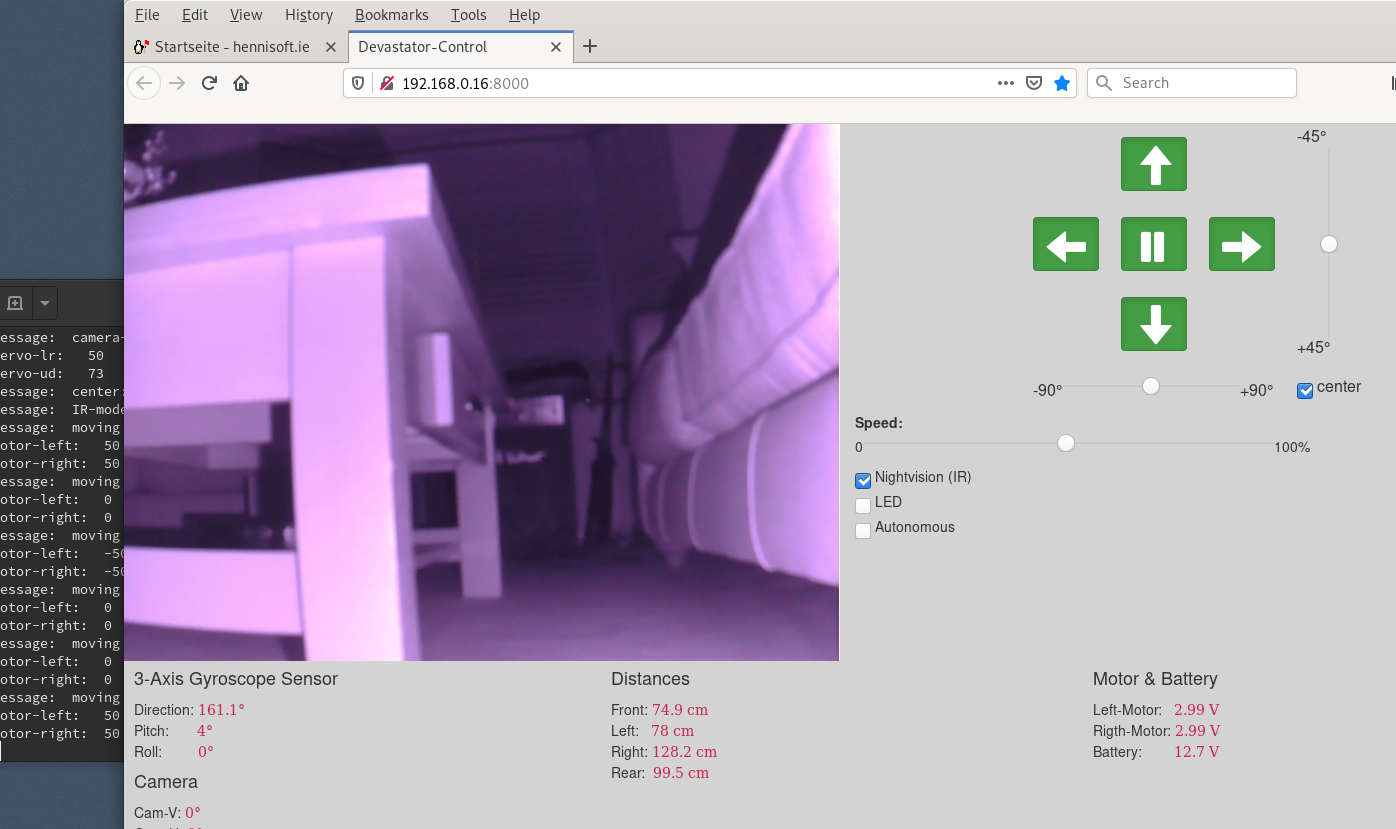
Devastator
surveillance-robot:
semi-autonomous robot, which will be controlled via webinterface and includes following features:
- livestream video
- 4x ultrasonic distance sensors
- control of movable camera which is IR capable and active IR-led
- controlable led (or any digital output)
- status feedback (like batterie status, resource usage)
- 3-axis sensor + compass
item-list:
- Raspberry Pi zero w details
- Devastator (Tank Mobile Robot Platform - including 2 6V motors) details
- Thunderborg (Dual 5A Motor Controller with DC/DC & RGB LED - I2C) details
- Ultraborg (PWM Servo Control w/ Ultrasonic Sensor Support - I2C) details
- CMPS10 (Tilt Compensated Compass Module - I2C) details
- 4x HC-SR04 (Ultrasonic Distance Sensor) details
- ADA1967 (Mini Pan-Tilt Kit - Assembled with Micro Servos) details
- Raspberry Pi Camera Board (Night Vision & Adjustable-Focus Lens) details
- BC337 NPN transistor
- rectifier diode
- 2x 330 Ω resistors
- 2.2 µF capacitor
- mini breadboard
- ... and a few cables
↑ ←
Python sourcecode:
Quellcode devastator3.py
↑ ←
HTML source:
Quellcode devastator2.html
↑ ←
... ready, but not documented yet. Please see some pictures meanwhile:



↑ ←
download:
robotarm
- sourcecode robotarm.py
- mandatory class for read single char getch.py
- video (~ 32 MB) robotarm.avi
multifunction-display
- sourcecode lcd_temp.py
- circuit
multi-function-display-Steckplatine.jpg
(made with "Fritzing") - video (~ 57 MB) multifunction_display.avi
Zumo-Control
control of Zumo via Bluetooth
- Android source (project exported from Android Studio) Zumo-Control.zip
- Python source: control-zumo.py
- circuit: zumo-control_fritzing.jpg
Devastator surveillance robot
- Python sourcecode devastator3.py
- HTML sourcecode devastator2.html